Summary:
Researchers in the Mechanical Engineering Department at UCLA developed an innovative mechatronic system that can perform fast and accurate pressure regulation during cataract surgeries.
Background:
Despite being generally safe and successful, cataract surgery has a complication rate of about 6%, which is concerning given the high volume of procedures. Maintaining a specific intraocular pressure (IOP) level during eye surgery is crucial for anatomical integrity and safety. The current method employed in this type of surgery creates pressure disturbances within the eye, which can cause deformation and damage to intraocular tissues. Fluid control machines that have been developed for other types of eye surgery are not well suited for cataract surgery, and do not provide a rapid enough response time. Therefore, there is a critical need for an IOP regulation system with small pressure excursions and a fast settling time to effectively mitigate surge phenomena.
Innovation:
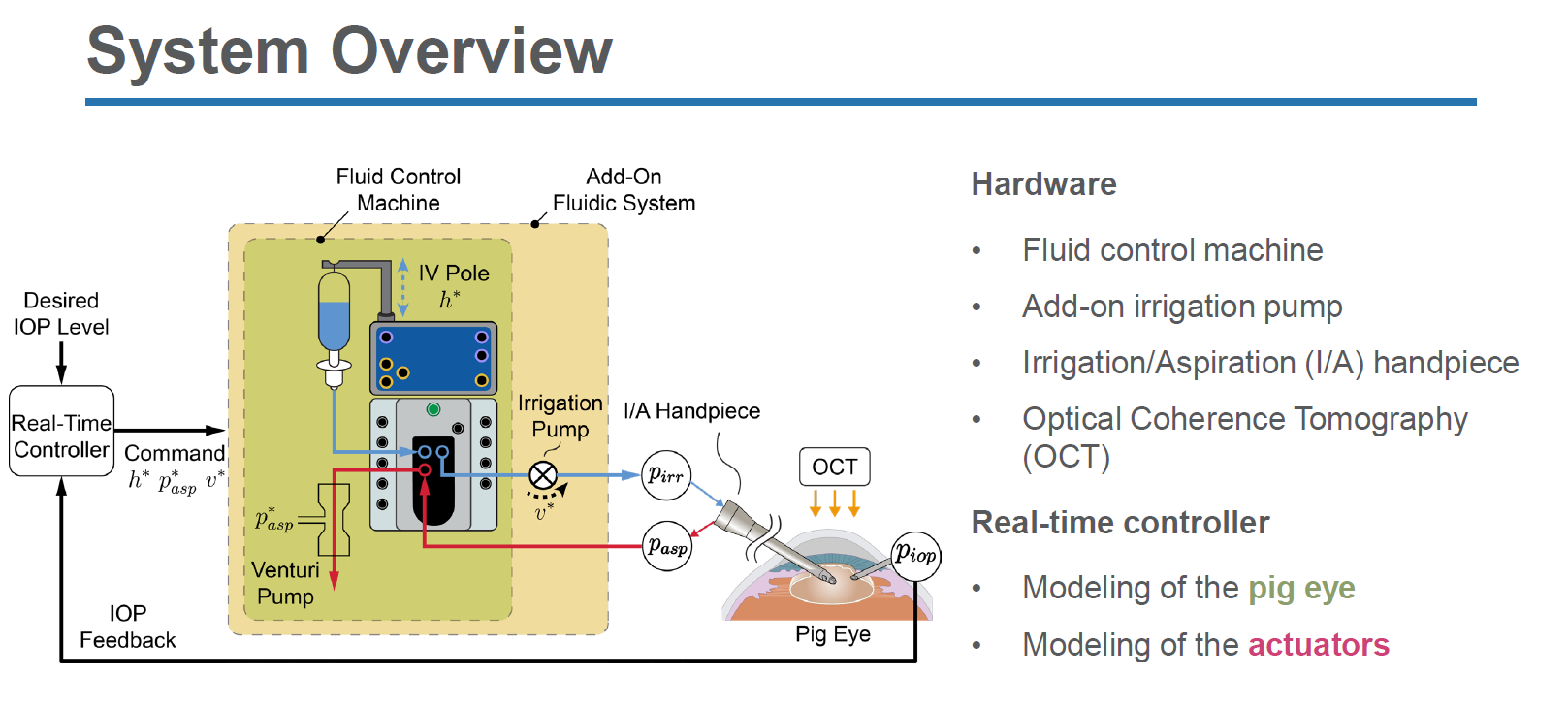
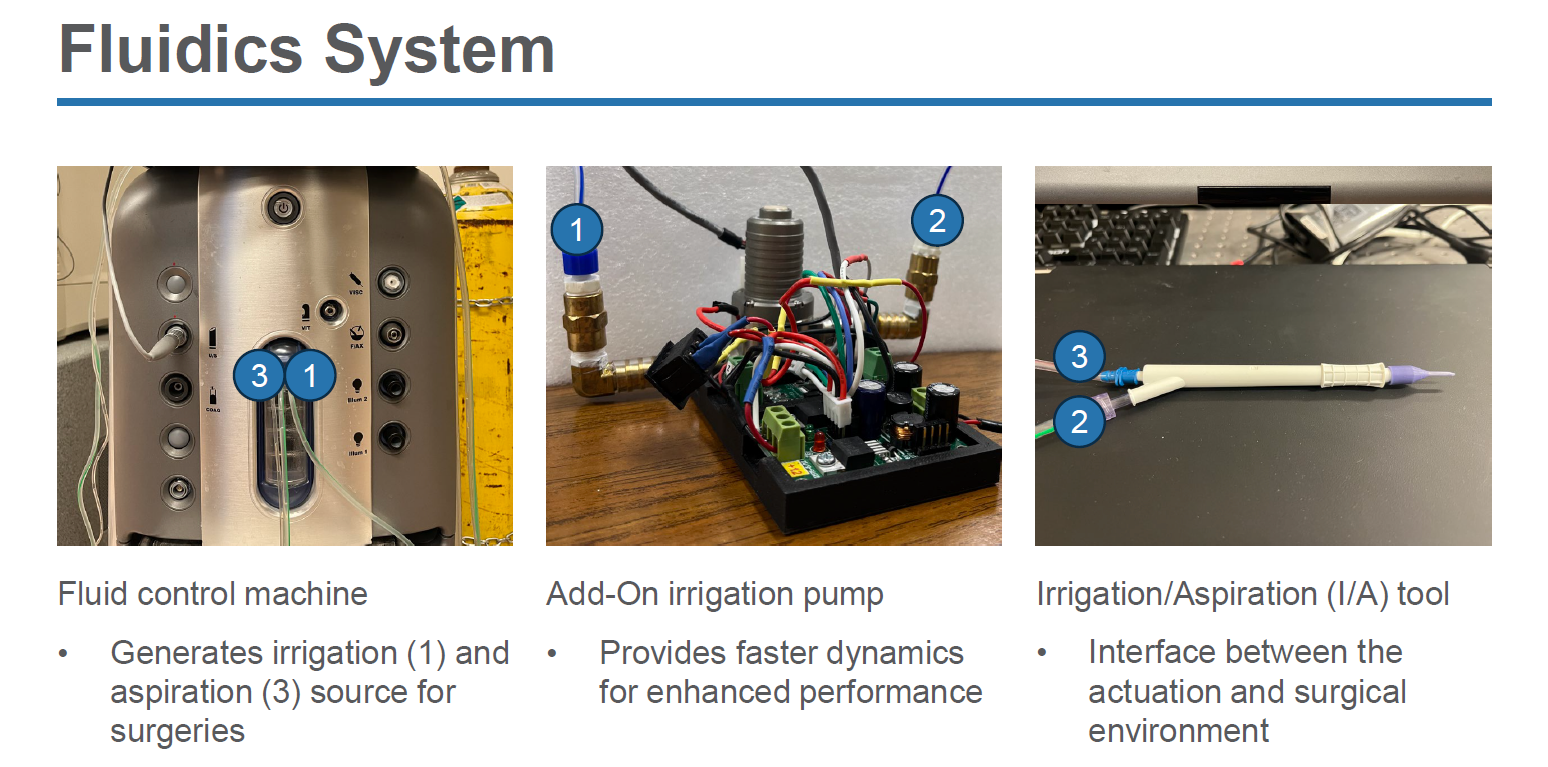
UCLA researchers have developed an innovative mechatronic system and control algorithm that can perform fast and accurate intraocular pressure (IOP) regulation. The invention includes an independent irrigation and aspiration system that can be integrated with current fluid control machines. This system employs a dual-pump mechanism that creates a feedback loop for the developed software, allowing four actuators to precisely control IOP levels using three advanced control strategies: IOP regulation without pulsatile flows, pulsatile aspiration, and pulsatile irrigation. This system has shown a 50% decrease in surge peak time, a 74% decrease in maximum pressure, and a 75% decrease in settling time. This innovation significantly improves surgical safety, efficiency, and effectiveness in removing emulsified cataract lenses.
Credit: UCLA Mechatronics and Controls Laboratory
Potential Applications:
• Cataract Surgeries
• Retinal Surgeries
• Glaucoma Surgeries
• Robotic-Assisted surgery development
• Control of intracranial pressure in neurosurgeries
• Control of blood flow and pressure in heart and vascular procedures
• Minimally invasive procedures such as endoscopic surgeries
• Orthopaedic joint arthroplasty fluid flow and pressure monitoring
Advantages:
• Reliably monitors IOP levels
• Delivers precise aspiration and irrigation
• Does not cause significant transient IOP excursions
• Eliminates human error and need for manual aspiration during cataract surgery
• Easily adaptable to all existing phacoemulsification machines
• Can be easily integrated into a robotic surgical system or utilized as a handheld instrument for manual surgery
State of Development:
The inventors have successfully demonstrated the invention on 12/30/2023 and have submitted for publication on 4/5/2024.
Related Papers:
• Barzelay, A, Lai, Y.T., 2024. Add-On Fluidic Control System for Enhancing Intraocular Pressure Stabilization and Reducing Tissue Deformation; Conference: 2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM)
• Lee, Y.H., Lai, Y.T., Gerber, M.J., Dodds, J., Hubschman, J.P., Rosen, J. and Tsao, T.C., 2023. Accurate Robotic Posterior Capsule Polishing With Tissue Stabilization. IEEE/ASME Transactions on Mechatronics. https://ieeexplore.ieee.org/document/10149492
• Chen, C.W., Lee, Y.H., Gerber, M.J., Cheng, H., Yang, Y.C., Govetto, A., Francone, A.A., Soatto, S., Grundfest, W.S., Hubschman, J.P. and Tsao, T.C., 2018. Intraocular robotic interventional surgical system (IRISS): semiautomated OCT-guided cataract removal. The International Journal of Medical Robotics and Computer Assisted Surgery, 14(6), p.e1949. https://link.springer.com/article/10.1007/s43154-021-00071-4
• Wilson, J.T., Gerber, M.J., Prince, S.W., Chen, C.W., Schwartz, S.D., Hubschman, J.P. and Tsao, T.C., 2018. Intraocular robotic interventional surgical system (iriss): Mechanical design, evaluation, and master–slave manipulation. The International Journal of Medical Robotics and Computer Assisted Surgery, 14(1), p.e1842. https://pubmed.ncbi.nlm.nih.gov/28762253/
Reference:
UCLA Case No. 2024-229